Normal values of the joints / range of motion
Neutral zero method
The neutral-zero method is a standardized method for documenting the extent of movement of a joint. The range of motion is given in degrees. In this way, other doctors, who have not seen the patient, can understand the range of motion or, if necessary, restrictions in the joint movements.

To understand the neutral zero method, one must first understand the Neutral position explain, which is indicated with 0 °. She is the position in which a person is stands upright, his poor hang down that thumb point forward and the Feet stand parallel to each other. The Knee joints and the Elbow are not completely stretched out, but lie relaxed on the body. The small angle that arises is still given as 0 °.
In order to understand the information about freedom of movement of a joint, must also the direction to be calledin which is tested. In the statutory accident insurance, it has become established first of all to indicate the movements that move away from the body. These include Elongation, Outward rotation or Outward movement like spreading an arm. This is followed by the neutral position and then come the movements that are directed towards the body: diffraction, Inward rotation and Inward movement how to bring the Upper arm.
A normal healthy range of motion can look like this: 10°-0°-120. 10 ° extension in one joint, 0 ° is the neutral position, 120 ° flexion in the same joint. A joint often has the ability to move in more directions than forward or backward. So must the neutral zero method for each direction of movement be written down. Usually a joint can turn into three different axes move in space. One speaks of three degrees of freedom. If one or two main directions are blocked, the number of degrees of freedom is minimized.
What types of joints are there?

Joints can be in real and fake joints to be grouped. You can find out more about this here.
There is also a classification according to Shape of the articular surface. So there are eight types of joints.
- Ball joint: This is a spherical joint headin a matching Socket lies. The Shoulder joint belongs to the ball joint. It owns three degrees of freedom. It can be bent, stretched, turned inwards or outwards, spread apart or brought closer.
This is a special ball joint hip joint. It's a so called Nut joint. What is special about the nut joint is that the joint socket encloses more than fifty percent of the joint head. - Hinge joint: The rod end has the Shape of a roller and lies in the matching socket, which one cylinder-like cavity corresponds to. These joints include the Interphalangeal joints. These joints are between the bones of the Phalanges to find. The Humeroulnar joint, which is located between the humerus and ulna, is also a hinge joint. All hinge joints only have a degree of freedom. Flexion or extension can be performed.
- Swivel joint: It is a compound joint from a swivel and a hinge joint. It has the option of performing internal or external rotation as well as flexing and stretching the joint. That belongs to this type of joint Elbow joint.
- Saddle joint: It has a saddle-shaped articular surface with an outward and an inward curvature. One can look at the articular surfaces like a Rider saddle with matching rider to introduce. The areas have the option of being in two axes in space to move. You can move forward and backward and move sideways to the right or left. The Metacarpophalangeal joint is counted as part of the saddle joint.
- Condylar joint: The Knee joint is a condylar joint in which the Articulated rollers (=Condyles) are in contact with each other. You own two degrees of freedom. A rotation inwards or outwards and a flexion or extension can take place.
- Swivel joint: The swivel joint has an articular surface with a groove-shaped recessin which the cone-shaped joint head lies. There is another division into Wheel and pivot joint. With the first, the articular surface rotates around the rigid pin and with the second, it is exactly the other way around. The joint possesses a degree of freedom. It can do an internal or external rotation. This is the case with the distal radioulnar joint also as Pronation or Supination designated. The distal radioulnar joint is located between the spoke and Cubit, near the wrist.
- Egg joint or ellipsoid joint: It owes its name to its appearance. It owns an after outwardly curved, convex articular surface and one after inside curved concave area. The cross-section of the surfaces has an ellipsoidal shape. The joint socket is always slightly larger than the joint head. The wrist is one of the egg joints. You have the option of logging into two main axes to move. A forward and backward movement and a movement to the left or right are possible here. The wrist can also allow a minimal amount of rotation.
- Flat joint: The Intervertebral joint is one of these. Here two flat, flat joint surfaces are in contact. It finds one minimal turning and sliding movement instead of.
Illustration of the different joint shapes

- Wheel angle joint
= Swivel hinge joint
(e.g. knee joint) - Saddle joint
(e.g. thumb saddle joint) - Ball joint
(e.g. shoulder joint,
Hip joint) - Hinge joint
(e.g. elbow joint) - Wheel joint
= Pivot joint
(e.g. spoke-ulnar joints) - Egg joint (not shown)
similar to ball joint,
only biaxial
(e.g. proximal wrist)
Uniaxial Joints -
Hinge joint and wheel joint
Biaxial joints -
Wheel angle joint, saddle joint
and egg joint
Triaxial joint - Ball joint
You can find an overview of all Dr-Gumpert images at: medical illustrations
Joint mobility of the upper extremities
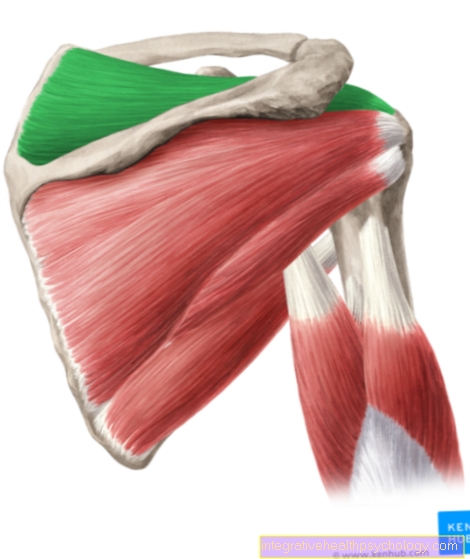
Shoulder joint: It is a Ball joint and have three degrees of freedom. In the neutral-zero method, this is stated as follows:
40° - 0° - 170° in the flexion (backward movement) and extension (forward movement) of the upper arm towards the upper body
30° - 0° - 40° Spreading and bringing the upper arm towards you
60° - 0° - 70° Turning out and turning in
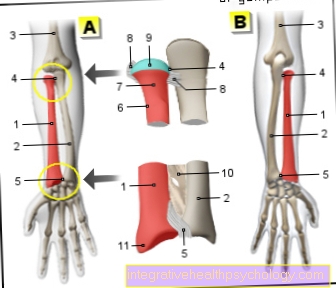
Elbow joint: It is a compound joint and consists of one Upper arm-ulnar joint, one Upper arm-spoke joint and one Ellen-spoke joint. The first is a Hinge joint and can flex or stretch. The second is a Ball joint, but has only two degrees of freedom because of its connective tissue attachment, inward and outward rotation and extension or flexion. The third is a Wheel joint. Together, this is a swivel hinge joint and therefore has two degrees of freedom.
10° (possible for children and women) – 0° - 150° Extension and flexion of the forearm to the upper arm.
90° - 0° - 90° Rotation outwards and inwards. This movement occurs in conjunction with the distal ulnar-spoke joint.
wrist: The wrist is a Egg joint and has the following degrees of freedom:
- 40-60° - 0° - 50-70° Extend your hand backwards and bend your hand forward
20-30° - 0° - 30-40° Bending sideways to the ulna or bending to the spoke
Head joint: The head joint is the joint between the skull and the Cervical spine. It is divided into an upper and a lower joint. In technical jargon, they are called Articulatio atlantooccipitalis and as Articulatio atlantoaxialis designated. In the atlantoaxial joint, the lower head joint, which is located between the first cervical vertebra (Atlas) and the second (Axis) lies. It becomes the Wheel joints counted and is responsible for the turning movement of the head. The atlanto-occipital joint is located between the first cervical vertebra (atlas) and the base of the skull. This is a Egg jointthat allows the head to be tilted forwards and backwards, i.e. it is responsible for nodding.
Joint mobility of the lower extremities
hip joint: The range of motion of the Nut joint lies by:
5-10° - 0° - 130° Extension / Flexion
45° - 0° - 30° Spreading / bringing in
50° - 0° - 40° Turning outwards / inwards
Knee joint: It's about a Condylar joint. It has the following degrees of freedom in its two main axes:
5-10° - 0° - 130° Extension and Flexion
30-40° - 0° - 10° Outward rotation and inward rotation with the knee bent.
Upper ankle: It is a pure one Hinge jointformed by the lower leg bones and talus. His freedom of movement is about:
20° - 0° - 40° Raising and lowering the foot
Lower ankle: There is an anterior and posterior lower ankle joint. Together they only have one main axis with the following mobility:
15-10° - 0° - 20-30° Raise or lower the outer edge of the foot. The lifting of the edge of the foot is called eversion. Lowering as an inversion.
Metatarsophalangeal joint: It lies between the head of the metatarsal bone and the first phalanx of the toe bone. Actually the joint is a Ball joint. Its freedom of movement is restricted by important ligaments and muscles. So only the following movement is possible:
70° - 0° - 45° Stretching and bending the metatarsophalangeal joint of the big toe.
Deviations in degrees of angle
With the ones given above Degrees of freedom of movement the most important joints in the body are Standard values, a minimal deviation is always possible and is not of any further concern.
It comes to clear deviation the normal values, something may be wrong with the joint. Restricted movements are then also displayed differently. Will the Neutral zero position no longer achieved due to an illness, the value "0 °" shifts from the center to the side where the deficit exists.
An example of one impaired freedom of movement would be in a joint 0°-20°-20° (Extension / flexion). It would be a Joint stiffening act. The joint would thus have its neutral-zero position at 20 ° and cannot be moved. So it has a range of motion of 0 ° with a stretch deficit of 20 °.
Another example often comes with one Elbow fracture in front. The elbow can be bent to a maximum of 100 ° after the break, the extension remains at 30 °. The extension deficit is thus 30 °. In the neutral-zero method it looks like this: 0°-30°-100° Extension / Flexion.
With this uniform method, every doctor can do that Understand movement deficitwithout even having seen the person concerned.